Ubuntu 18.04 安装RealSense D435教程
1.更新内核
运行代码
1 | uname -r |
如果>=4.4.0-50的版本则ok,否则需要升级内核。
2.更新cmake(需要3.6以上版本)(需要科学上网)
首先下载cmake-3.13.2.tar.gz :
https://cmake.org/download/
在主文件夹下新建tools/文件夹,将cmake-3.13.2.tar.gz解压之后放在tools/中,更改权限
解压:
1 | sudo tar -zxvf cmake-3.13.2.tar.gz |
赋权限:
1 | sudo chmod -R 777 cmake-3.13.2 |
安装gcc-c++:
1 | sudo apt-get install build-essential |
查看是否安装成功以及安装版本:
1 | cmake --version |
3.安装依赖
1 | sudo apt-get install libusb-1.0-0-dev pkg-config libgtk-3-dev |
4.下载realsense库(强烈建议科学上网!!否则请先下载好解压到目录)
1 | sudo git clone https://github.com/IntelRealSense/librealsense.git |
5.进入librealsense路径下,执行下列命令(cmake时科学上网)
1 | mkdir build && cd build |
6.安装(安装之前务必确认cmake成功)
1 | make && sudo make install |
7.切换到librealsense的路径下,安装Video4Linux视频内核驱动,不能插Realsense!!!!
1 | sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/ |
8.安装Openssl库:
1 | sudo apt-get install libssl-dev |
9.编译配置文件:
1 | ./scripts/patch-realsense-ubuntu-lts.sh |
注意上面的配置文件,一定是lts版本!否则程序会崩!
10.检查安装驱动是否成功
完成后,插上Realsense,执行
1 | sudo dmesg | tail -n 50 |
无失败信息则安装驱动成功
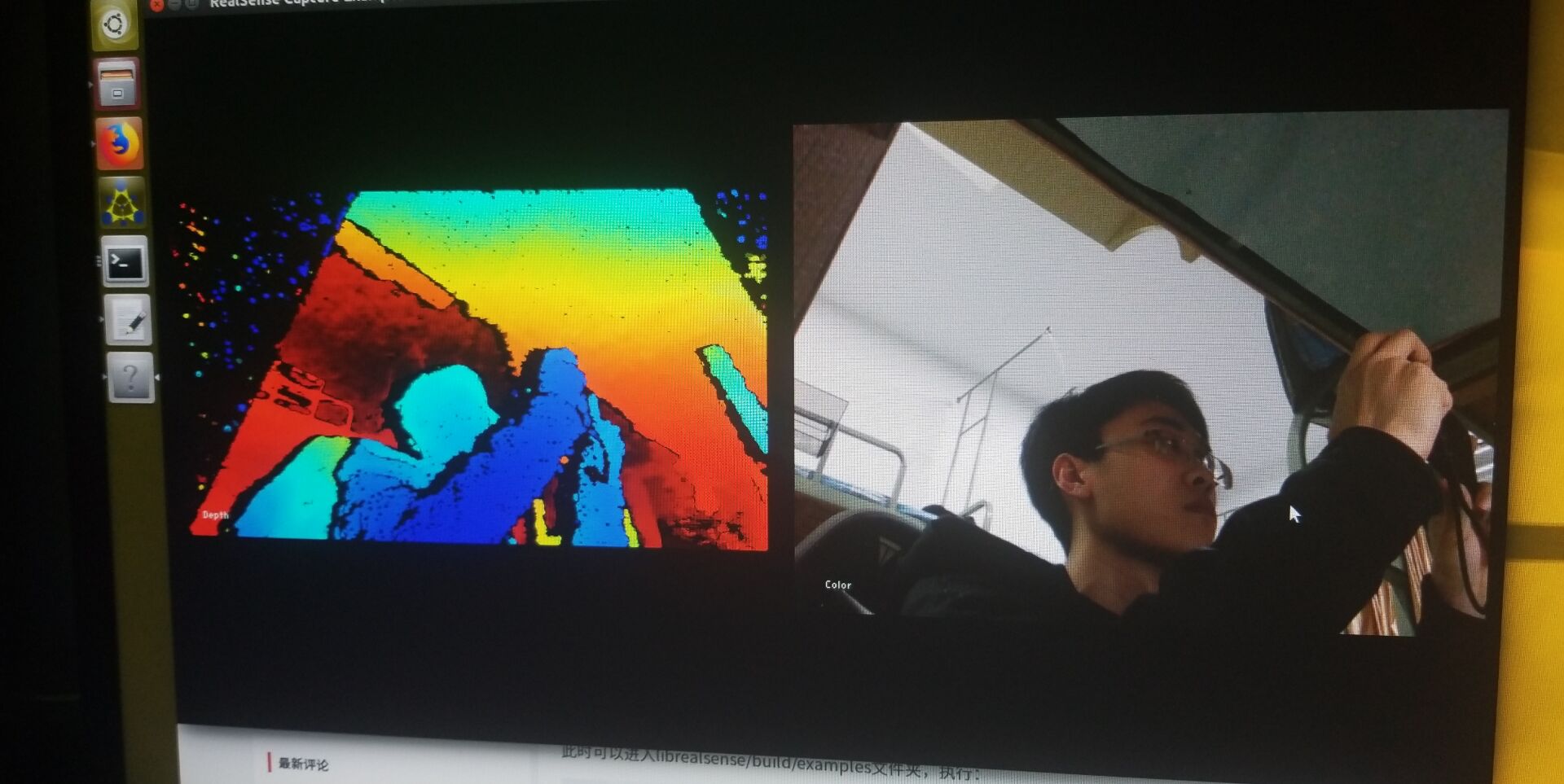
11.运行例程检验
进入librealsense/build/examples文件夹,执行
1 | cd capture |
看到彩图和深度图即安装成功。
 //realsense官方ROS包的安装
//realsense官方ROS包的安装1.通过源码安装intel RealSense ROS(安装和使用可参考github: https://github.com/intel-ros/realsense )
2.git或粘贴到工作空间
3.编译
4.测试roslaunch realsense2_camera opensource_tracking.launch
可能会出现缺少包的情况,安装即可。
出现点云数据、摄像头数据即成功。
版本:ver1.1
Ubuntu 18.04 安装RealSense D435教程